Center of Mass¶
Our goal is to discuss the center of mass in discrete and continuous cases. We will use the discrete examples to motivate the passage to the limit, and again see the interplay of summation and integration.
The Lever¶
Today, we will follow Polya and Archimedes to determine the law of the lever. We will move this to the two dimensional case, and push this to uniform regions in the 2-Dimensional plane. We will do all of this in symbols and with Python.
The Path¶
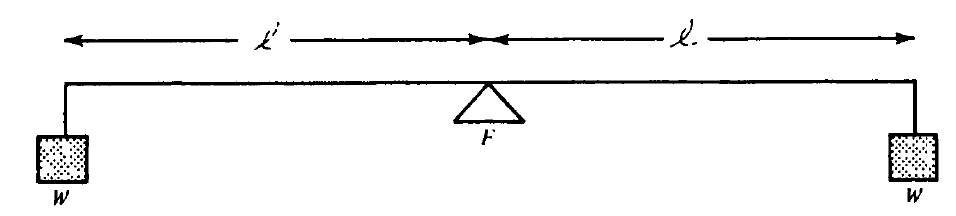
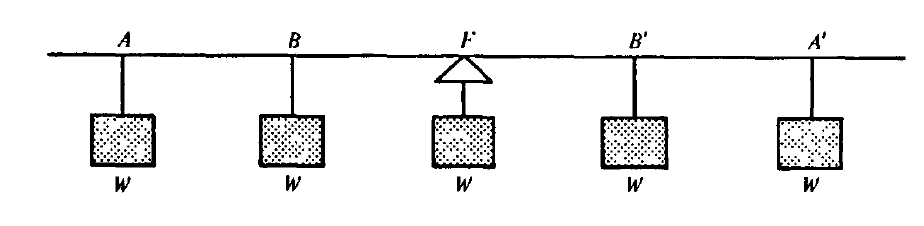
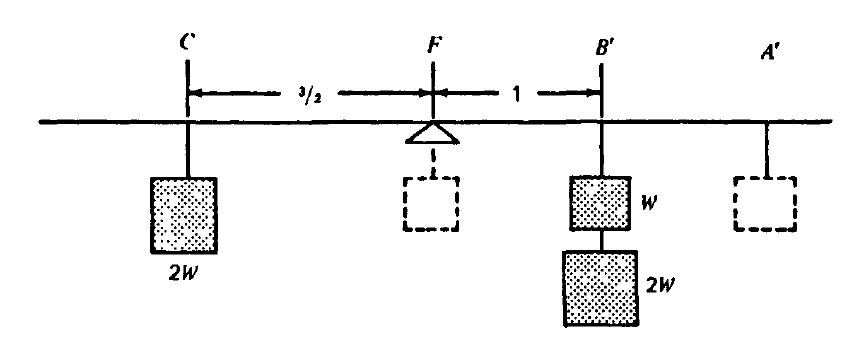
Axiom I: Equal weights at equal distances are in equilibrium.
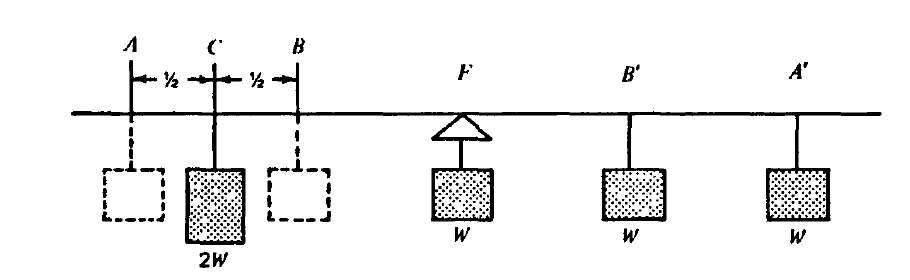
Axiom II: \(W\) at each end \(\cong 2W\) in middle.

Generalizing¶
Thus, we propose that:
These values determined by weight :math:`times` distance are called moments. A SeeSaw full of robots will be in equilibrium, or balanced, when the moments to the left of the fulcrum are equal to the moments to the right.
Solving A 1-D Problem two ways¶
Suppose we have three masses distributed on a lever, as shown in the image below:
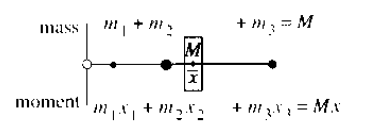
Here, the center of mass is determined by the following definition:
For example, we can choose masses 1, 3, and 2 located at distances 1, 3, and 7 from the left end of the lever respectively. Using the definition, we have
We should be able to work in reverse from the picture and distribute weights evenly as we had done with Archimedes as a method to check.
Finally, we want to be able to see the connection of the definite integral in the continuous case. We will consider things with uniform density \(\rho\) here, so we have
2-D Case: Discrete Point Masses¶
The formulas might be what we expect, however, we should note the presence of the \(M_y\) in the \(x\)-coordinate and the \(M_x\) in the \(y\)-coordinate.
Thus, if we have masses 1 and 4 located at points \((1,0)\) and \((0,1)\) respectively, we have a center of mass at
In [1]:
%matplotlib notebook
import matplotlib.pyplot as plt
import numpy as np
import sympy as sy
In [2]:
ax = plt.figure()
plt.plot(0, 1, 'o', color = 'blue', markersize = 20)
plt.plot(1,0, 'o', color = 'blue', markersize = 5)
plt.xlim(-0.5, 1.5)
plt.ylim(-0.5, 1.5)
plt.plot(0.2, 0.8, 'o', color = 'red')
ax.text(.3, 0.55, 'Center of Mass')

Out[2]:
<matplotlib.text.Text at 0x10f254f98>
2-D Continuous Region¶
For this example, we consider the components \(M_x, M_y, M\) and their meaning if we have a solid two dimensional region with uniform density.
mass M = area of plate \(~\)
moment \(M_x = \int\)(distance \(x\))(length of vertical strip)\(dx\)
moment \(M_y = \int\)(height \(y\))(length of horizontal strip)\(dy\)
For example, suppose a plate has sides \(x=0\), \(y=0\), and the line \(y=4-2x\)
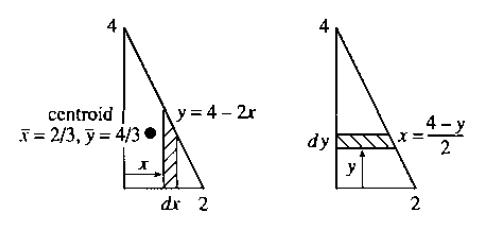
Thus, we have:
- \(M=\int_0^2 (4-2x)dx\)
- \(M_x = \int_0^2 x(4-2x)dx\)
- \(M_y = \int_0^2 y\frac{1}{2}(4-y)dy\)
In [3]:
x,y = sy.symbols('x y')
sy.solve(4-2*x-y, x)
Out[3]:
[-y/2 + 2]
In [4]:
my = sy.integrate(x*(4-2*x), (x, 0, 2))
mx = sy.integrate(y*0.5*(4-y), (y, 0, 4))
m = sy.integrate(4-2*x, (x, 0, 2))
print('Total Mass: ', m, '\nMx: ', mx,'\nMy: ', my)
print('x = ', my/m, 'y= ', mx/m)
Total Mass: 4
Mx: 5.33333333333333
My: 8/3
x = 2/3 y= 1.33333333333333
In [5]:
x = np.linspace(0,2,1000)
y = 4-2*x
ax = plt.figure()
plt.plot(x,y)
plt.fill_between(x, y, alpha =0.2, hatch='x')
plt.plot(my/m, mx/m, 'o', markersize = 15)
plt.title("Center of Mass for region bounded \nby $x=0,2$ and $y=4-2x$")

Out[5]:
<matplotlib.text.Text at 0x10f2e8dd8>